@Armored_Blob maybe harder for your brain but it’s known as a less CPU demanding technic.
A way to approach the thing in a more relaxed way, visualize/imagine them like if you where at the command of a plane and flying where you want.
Looking here to simply get in mind the rotations for a finite subset of the rotation group may help you too.
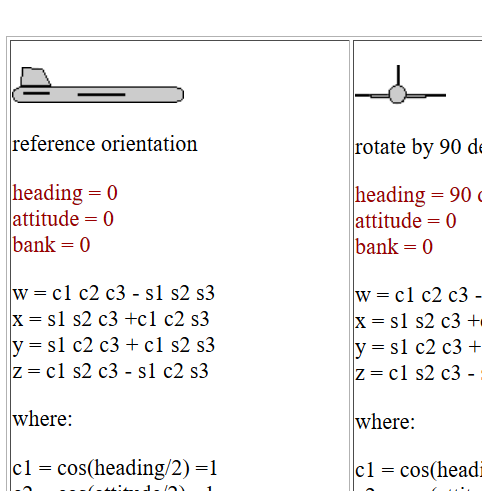 https://www.euclideanspace.com/maths/geometry/rotations/conversions/eulerToQuaternion/steps/index.htm
https://www.euclideanspace.com/maths/geometry/rotations/conversions/eulerToQuaternion/steps/index.htm