Instruction and Armory project:
http://www.dzynek.pl/armory3d/9-free-tween-for-armory3d-move-scale-rotate
Instruction and Armory project:
http://www.dzynek.pl/armory3d/9-free-tween-for-armory3d-move-scale-rotate
Hello,
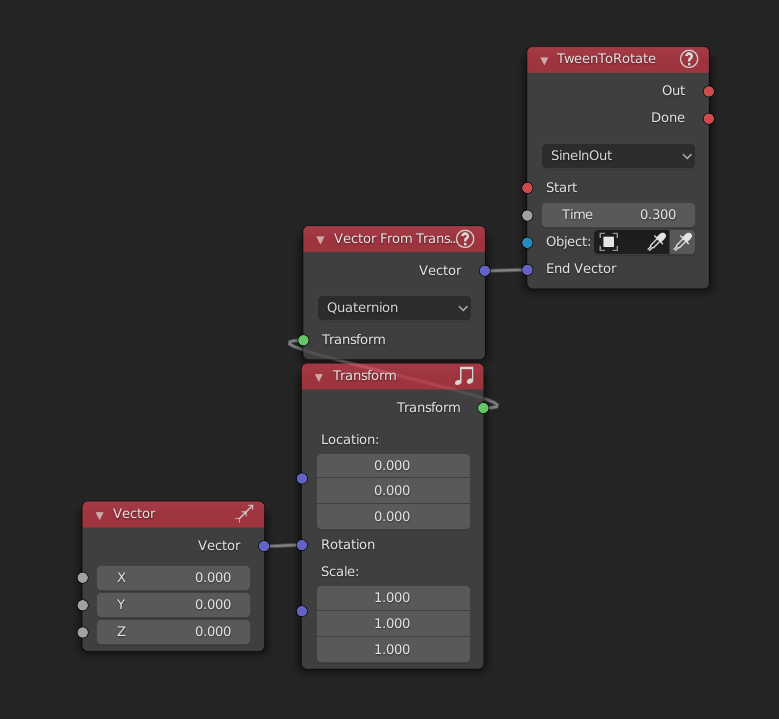
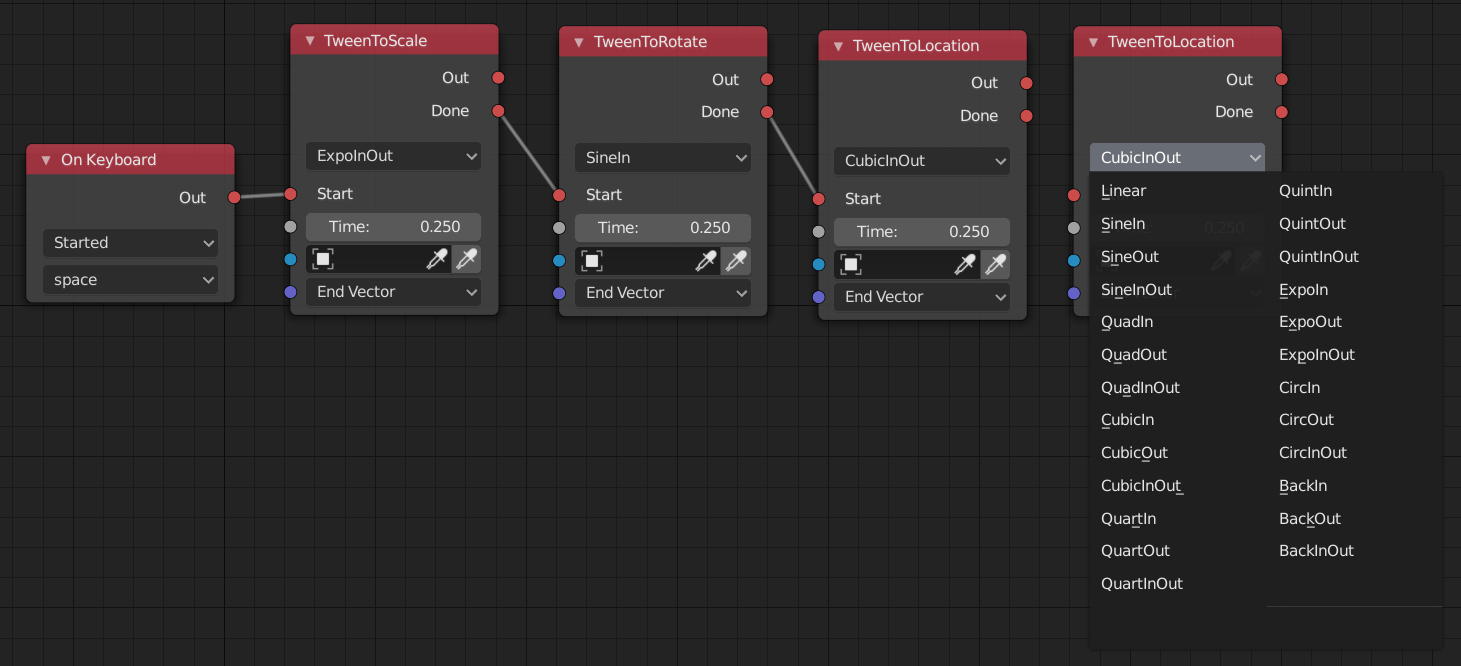
I’m trying to use your library TweenToRotate, but I can’t get it work properly.
I want an object to get the transform of another object. It works for TweenToLocation with the node “Get Location” on the target object, but not with “Get Rotation” and TweenToRotate.
The results are strange. Does it works with Euler Angles, or other coordinate system ?
Do I need to respect some constraints ?
Thanks in advance for your help, this library could be really useful.
Mokauno.
I confirm the problem with TweenToRotate but I don’t know where the problem is.
I paste the code
package armory.logicnode;
import iron.Scene;
import iron.math.Vec4;
import iron.system.Tween;
import iron.object.Object;
import armory.trait.physics.RigidBody;
class TweenToRotateNode extends LogicNode {
public var property0:String;
public function new(tree:LogicTree) {
super(tree);
}
var o:Object;
override function run(from:Int) {
var t = inputs[1].get();
o = inputs[2].get();
var v1 = inputs[3].get();
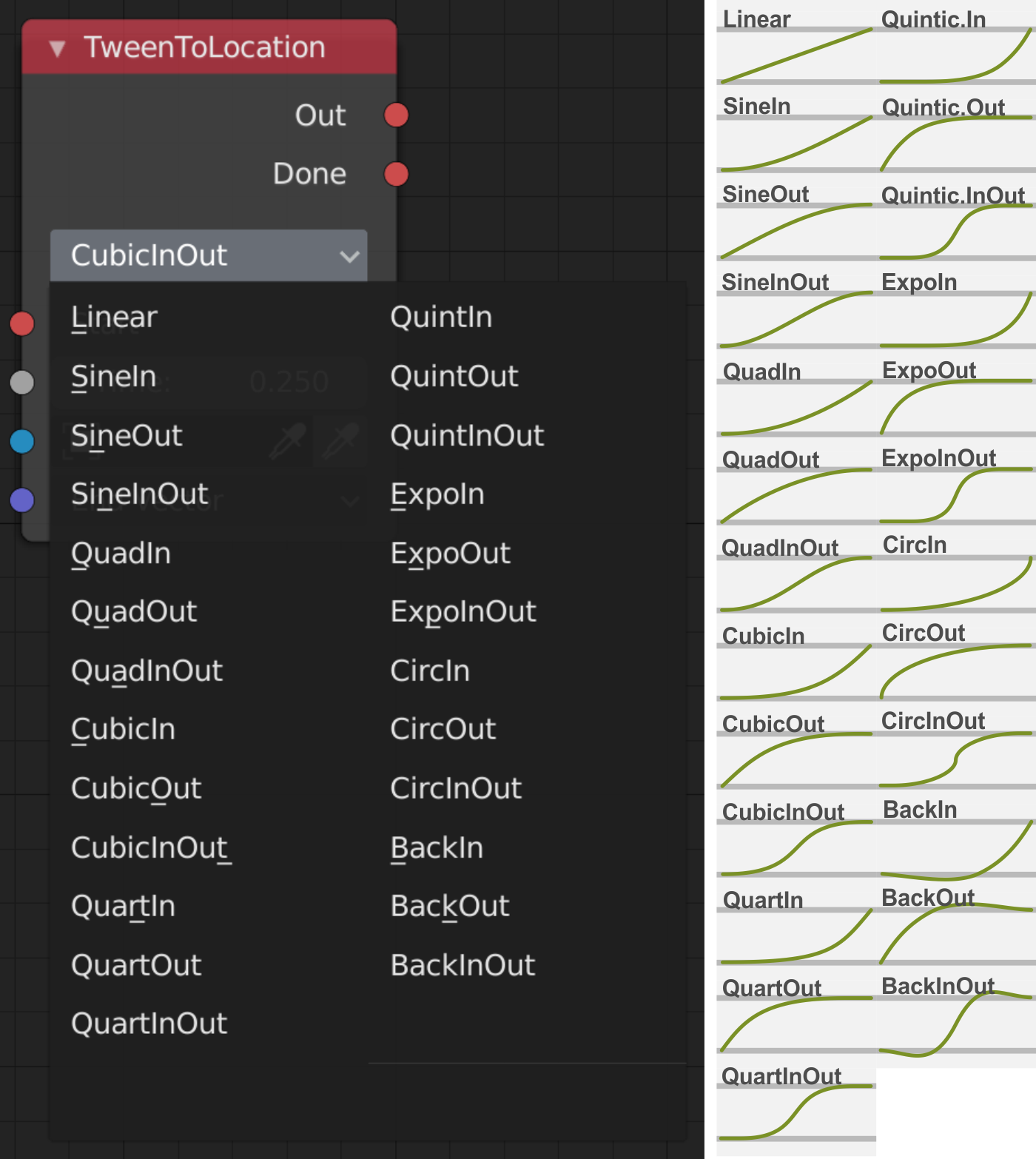
var e:Dynamic = Linear;
if (o == null || v1 == null) return;
switch (property0) {
case "Linear":
e = Linear;
case "SineIn":
e = SineIn;
case "SineOut":
e = SineOut;
case "SineInOut":
e = SineInOut;
case "QuadIn":
e = QuadIn;
case "QuadOut":
e = QuadOut;
case "QuadInOut":
e = QuadInOut;
case "CubicIn":
e = CubicIn;
case "CubicOut":
e = CubicOut;
case "CubicInOut":
e = CubicInOut;
case "QuartIn":
e = QuartIn;
case "QuartOut":
e = QuartOut;
case "QuartInOut":
e = QuartInOut;
case "QuintIn":
e = QuintIn;
case "QuintOut":
e = QuintOut;
case "QuintInOut":
e = QuintInOut;
case "ExpoIn":
e = ExpoIn;
case "ExpoOut":
e = ExpoOut;
case "ExpoInOut":
e = ExpoInOut;
case "CircIn":
e = CircIn;
case "CircOut":
e = CircOut;
case "CircInOut":
e = CircInOut;
case "BackIn":
e = BackIn;
case "BackOut":
e = BackOut;
case "BackInOut":
e = BackInOut;
}
iron.system.Tween.to({
target: o.transform,
props: { rot: v1 },
duration: t,
ease: e,
tick: update,
done: done
});
}
function update() {
#if arm_physics
var rigidBody = o.getTrait(RigidBody);
if (rigidBody != null) rigidBody.syncTransform();
#end
runOutput(0);
}
function done() {
runOutput(1);
}
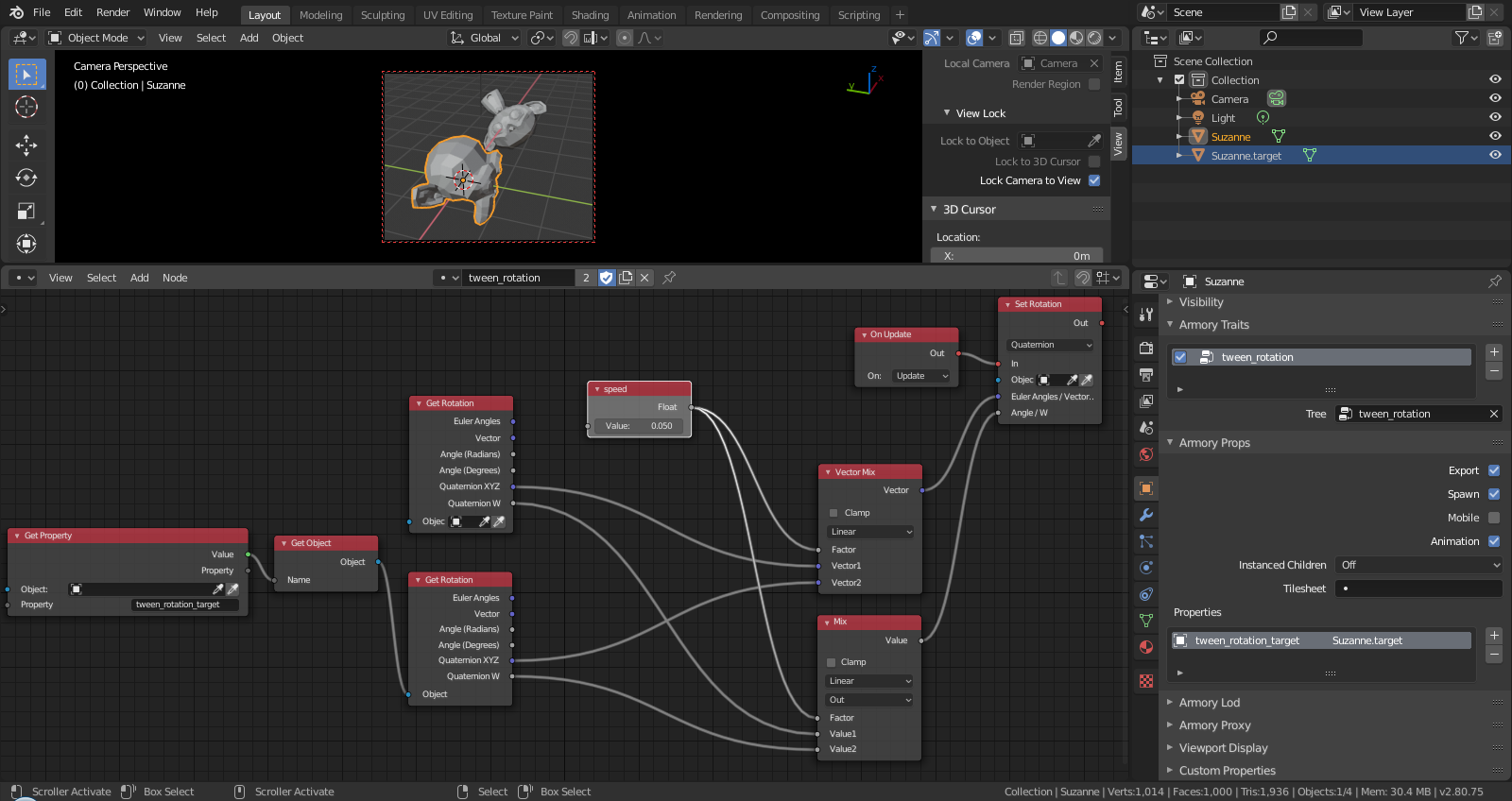
}OK, I get something interesting.
I think it works, in logic nodes. It’s not exactly tweening, but it allow an object to target the rotation of another object, with a parametrable speed.
Just stumbled onto this. Looks very cool.
Thanks for making this.
I did a quick search and found no Youtube videos on this. Are there any?
It would be nice to see these nodes in action. Might help my wrap my head around it… and make sure I’m doing it right.
Thanks again,
M